
情報学
2026.05.15
自動運転車両と路側センサを協調させる情報通信ソフトウェアを無料公開 信号のタイミングや死角の物体など感知、「レベル4」の実装加速へ
・路車協調型の自動運転サービスを支援するための、車両、路側機注1)、クラウドをつなぐ情報通信プラットフォームを開発。
・ソフトウェアをオープンソースで公開、誰でも自由に利用可能。
・千葉県柏市柏の葉地域でのレベル4自動運転注2)にて利用実績あり。
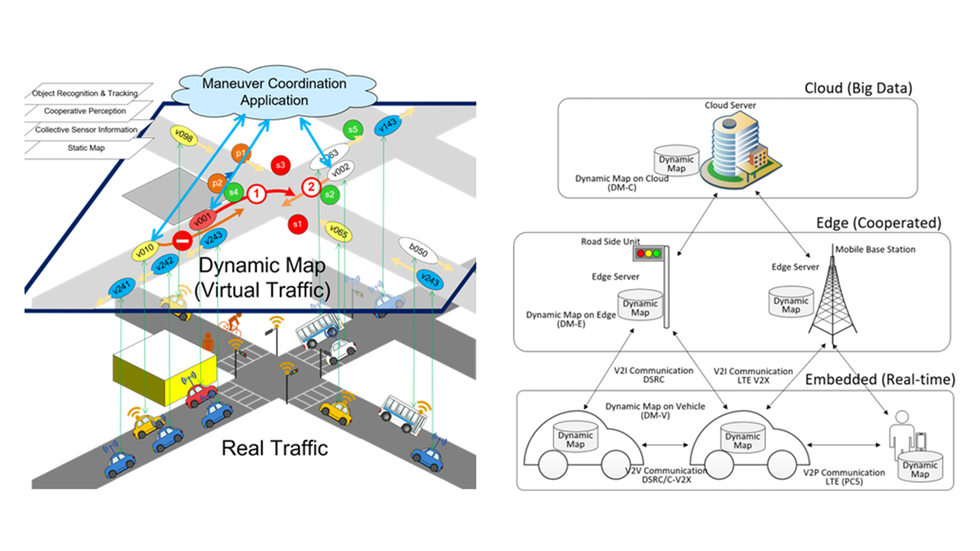
名古屋大学未来社会創造機構モビリティ社会研究所注3)および同大学院情報学研究科附属組込みシステム研究センター注4)の高田 広章 教授らの研究グループは、情報通信プラットフォーム「ダイナミックマップ2.0」をオープンソースソフトウェアとして公開しました。
運転手不足問題の解決や、さらなる交通安全の実現に向けて、自動運転に注目が集まっています。しかし日本の一般道路は道幅が狭く、街路樹・建造物によって見通しの悪い交差点が非常に多いため、車載センサだけに頼った自動運転では、死角からの飛び出しに備えた低速度での走行が必要になり、安全かつ円滑に走行できる場所が限られるのが実状です。そこで、高田教授らのグループは研究コンソーシアム注5)を立ち上げ、同志社大学モビリティ研究センター注6)のメンバーとも連携して、路側機からのセンサ情報や信号機からの灯色情報などを、自動運転車両に共有することで視野外の状況を伝えられる、協調型の自動運転支援のためのソフトウェア開発を行ってきました。
本ソフトウェアは、車両、路側機、クラウドをつなぐ情報連携を支援するための基盤ソフトウェアです。路側機のセンサが提供する物標情報注7)とフリースペース情報注8)、信号機が提供する灯色情報と残秒数(灯色が変わるまでの残り時間)、さらに自動運転に必要な高精度道路地図を扱うことができ、独自の仕様で出されることが多いこれらの情報に対して、無線方式にも依存しない共通インターフェースを提供します。情報の仕様の共通化は、効率的なソフトウェア開発において重要な意味を持ちます。そして今回、ダイナミックマップ2.0をオープンソースソフトウェアとして公開することで、この共通インターフェースを広く誰でも無償で利用できるようになります。協調型の自動運転を導入する際のコストを下げて、国内の多くの実証実験地域で使えるようにすることが目的です。
本ソフトウェアは、2026年5月15日付で github にて公開されます。オープンソースソフトウェアラインセンスに従って、個人・組織を問わず無償利用が可能です。
◆詳細(プレスリリース本文)はこちら
注1)路側機:
LiDARやカメラなどのセンサ、物体認識処理のための小型のコンピュータ、通信装置を搭載した装置。
注2)レベル4自動運転:
特定の条件・範囲内において、人間の運転手を必要とせず、システム主体で行われる自動運転。運転手が常にハンドルを握っていて、運転手の責任で行われるものはレベル2自動運転として区別される。
注3)名古屋大学未来社会創造機構モビリティ社会研究所:
研究代表者の所属組織。
https://www.gremo.mirai.nagoya-u.ac.jp/
注4)名古屋大学大学院情報学研究科附属組込みシステム研究センター:
研究代表者の兼務組織。
https://www.nces.i.nagoya-u.ac.jp/
注5)先進モビリティサービスのための情報通信プラットフォームに関するコンソーシアム:
ダイナミックマップ2.0のソフトウェアを開発した研究コンソーシアム。
https://www.nces.i.nagoya-u.ac.jp/admobi-dm2/index.html
注6)同志社大学モビリティ研究センター:
研究コンソーシアムのメンバーの所属組織。
https://mrc.doshisha.ac.jp/
注7)物標情報:
道路上に存在する物体に関する、位置座標、大きさ、物体種別(車両、歩行者など)、向きなどに関する情報。
注8)フリースペース情報:
道路上で物体の存在しない領域。自動運転車両を通行させても問題ないことがセンサ検知により確定している領域。
プロジェクト名: Dynamic Map 2.0 Platform
URL: https://github.com/dm20-consortium/dm20
ライセンス形態: MITライセンス
未来社会創造機構モビリティ社会研究所・大学院情報学研究科附属組込みシステム研究センター 高田 広章 教授
https://www.ertl.jp/

