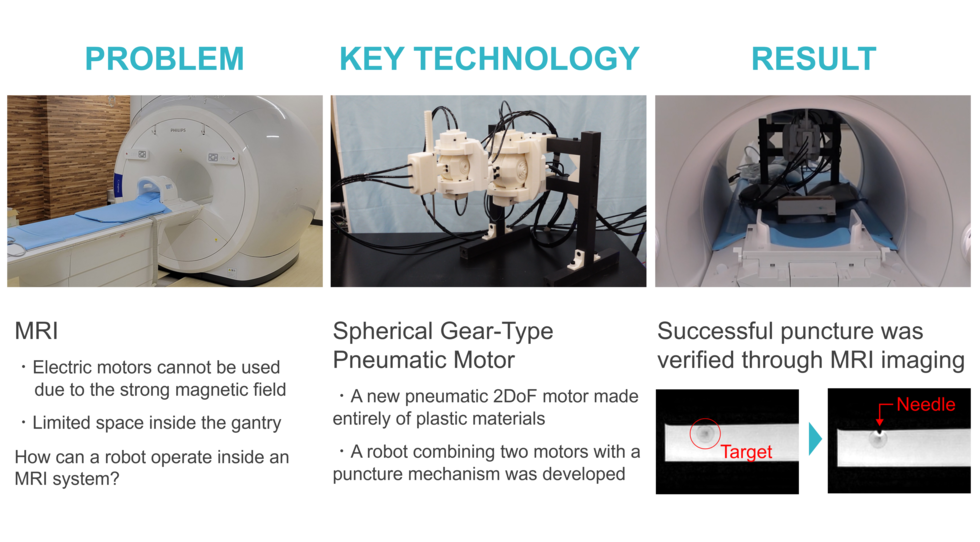
・MRI・CT内でロボットを動かす難しさ:MRI・CT画像を用いれば、体内の病変部を確認しながら治療を行うことができ、ロボットの遠隔操作による支援は術者の負担軽減につながる。一方、MRIでは強い磁場のため電動モータが使用できず、CTでは金属によるノイズが問題となる。また、装置のガントリ内は狭く、小型機構が求められる。
・球状歯車型空圧モータで動くロボット:部矢准教授らは非金属製の空圧駆動による「球状歯車型空圧モータ」注1)を開発し、1台で多方向回転が可能であることを実証してきた。
本研究では2台のモータを組み合わせ、穿刺(せんし)機構を備えた医療用ロボットを開発した。
・MRI内での穿刺を実証:開発したロボットは非金属材料で製作され、MRI・CT装置内での使用が可能である。東海中央病院の協力のもと、MRI装置内の強磁場環境下においても、遠隔操作により標的への穿刺が可能であることを実証した。
名古屋大学大学院工学研究科の部矢 明 准教授、森田 希 博士前期課程学生、井上 剛志 教授、ならびに名古屋大学大学院医学系研究科の藤原 道隆 特任教授(兼:東海中央病院 病院長)らの研究グループは、東海中央病院との共同研究により、MRI装置内でも使用可能な医療用ロボットを開発し、高磁場環境下で標的に対する穿刺が可能であることを実証しました。本ロボットは、1台でさまざまな方向へ回転できる非金属製の「球状歯車型空圧モータ」を駆動源としています。
MRIやCTの画像を確認しながら治療や検査を行う画像下治療注2)は、患者への負担が少ない医療技術として注目されています。一方で、MRIでは強い磁場を発生させるため磁性材の吸引事故のリスクがあり、CTでは術者の被ばくが問題となります。また、装置内部(ガントリ内)は空間が限られており、医療器具の操作が困難な場合があります。このため、装置内で安全に動作し、遠隔操作が可能な医療用ロボットの開発が求められてきました。
研究グループはこれまで、MRI・CT環境での使用を想定した球状歯車型空圧モータを開発し、基礎的な性能評価を行ってきました。本研究では、このモータを複数組み合わせ、先端に針を刺す機構を備えた穿刺ロボットを新たに開発しました。名古屋大学と東海中央病院による共同研究プロジェクトとして、東海中央病院のMRI室において実証実験を実施し、MRI装置が稼働する強力な磁場環境下においても、ロボットを遠隔操作し、標的に対して穿刺が可能であることを確認しました。
<研究紹介動画>
◆詳細(プレスリリース本文)はこちら
注1)球状歯車型空圧モータ:
球形状の歯車を利用し、空圧によって様々な方向へ回るモータ。
https://www.nagoya-u.ac.jp/researchinfo/result/2024/11/mrict.html
注2)画像下治療:
画像診断装置で体の中を透かして見ながら、医療器具を用いて治療する治療法。
大学院工学研究科 部矢 明 准教授
https://www.akira-heya.net/